In this previous blog post here (about this preprint joint with Alex Eskin), it was mentioned that the simplicity of Lyapunov exponents of the Kontsevich-Zorich cocycle over Teichmüller curves in moduli spaces of Abelian differentials (translation surfaces) can be determined by looking at the group of matrices coming from the associated monodromy representation thanks to a profound theorem of H. Furstenberg on the so-called Poisson boundary of certain homogenous spaces.
In particular, this meant that, in the case of Teichmüller curves, the study of Lyapunov exponents can be performed without the construction of any particular coding (combinatorial model) of the geodesic flow, a technical difficulty occurred in previous papers dedicated to the simplicity of Lyapunov exponents of the Kontsevich-Zorich cocycle (such as these articles here and here).
Of course, I was happy to use Furstenberg’s result as a black-box by the time Alex Eskin and I were writing our preprint, but I must confess that I was always curious to understand how Furstenberg’s theorem works. In fact, my curiosity grew even more when I discovered that Furstenberg wrote a survey article (of 63 pages) on this subject, but, nevertheless, this survey was not easily accessible on the internet. For this reason, after consulting a copy of Furstenberg’s survey at Institut Henri Poincaré (IHP) library, I was impressed by the high quality of the material (as expected) and I decided to buy the book containing this survey.
As the reader can imagine, I learned several theorems by reading Furstenberg’s survey and, for this reason, I thought that it could be a good idea to describe here the proof of a particular case of Furstenberg’s theorem on the Poisson boundary of lattices of  (mostly for my own benefit, but also because Furstenberg’s survey is not easy to find online to the best of my knowledge).
(mostly for my own benefit, but also because Furstenberg’s survey is not easy to find online to the best of my knowledge).
For the sake of exposition, I will divide the discussion of Furstenberg’s survey into two posts, using Furstenberg’s survey, his original articles and A. Furman’s survey as basic references.
For this first (introductory) post, we will discuss (below the fold) some of the motivations behind Furstenberg’s investigation of Poisson boundaries of lattices of Lie groups and we will construct such boundaries for arbitrary (locally compact) groups equipped with probability measures.
1. Some Motivations
Definition 1 A lattice  of a Lie group
of a Lie group  is a discrete subgroup such that the quotient
is a discrete subgroup such that the quotient  has finite volume with respect to the natural invariant measure induced from the (left-invariant) Haar measure on .
has finite volume with respect to the natural invariant measure induced from the (left-invariant) Haar measure on .
Example 1 Among the most basic examples of lattices, one has:  is a lattice of
is a lattice of  , and
, and  is a lattice of
is a lattice of  (cf. Zimmer’s book for instance).
(cf. Zimmer’s book for instance).
Definition 2 We say that a non-compact Lie group is an envelope of whenever is isomorphic to a lattice of .
Example 2 The Lie group  is an envelope of the free group on two generators
is an envelope of the free group on two generators  . Indeed, it is possible to show that
. Indeed, it is possible to show that  is isomorphic to the level two congruence subgroup of
is isomorphic to the level two congruence subgroup of 

via the isomorphism  and
and  . Since
. Since  is a finite-index (actually index
is a finite-index (actually index  , cf. Bergeron’s book for example) subgroup of (a lattice of , cf. Example 1), this shows that envelopes .
, cf. Bergeron’s book for example) subgroup of (a lattice of , cf. Example 1), this shows that envelopes .
Example 3 The Lie group  envelopes the fundamental group
envelopes the fundamental group  of any compact surface of genus
of any compact surface of genus  . In fact, by fixing any Riemann surface structure on
. In fact, by fixing any Riemann surface structure on  , we obtain from the uniformization theorem that
, we obtain from the uniformization theorem that  where
where  is a subgroup of the group
is a subgroup of the group  of hyperbolic isometries (Möbius transformations) of the hyperbolic plane
of hyperbolic isometries (Möbius transformations) of the hyperbolic plane  . Note that is a lattice of because
. Note that is a lattice of because  is naturally identified to the unit cotangent bundle of the compact surface , so that, by definition, envelopes .
is naturally identified to the unit cotangent bundle of the compact surface , so that, by definition, envelopes .
Once we have the notion of envelope of a (discrete) group , the following three questions arise naturally:
- i) Existence: What are the (discrete) groups admitting envelopes?
- ii) Uniqueness: If admits an envelope , to what extend is unique?
- iii) Rigidity: Let
 and
and  (resp.) be (discrete) groups enveloped by
(resp.) be (discrete) groups enveloped by  and
and  (resp.) and assume that is isomorphic to , say via an isomorphism
(resp.) and assume that is isomorphic to , say via an isomorphism  . Is it true that this isomorphism
. Is it true that this isomorphism  is the restriction of an isomorphism
is the restriction of an isomorphism  of the Lie groups and ?
of the Lie groups and ?
Here are some partial answers to these questions.
Firstly, all these questions have affirmative answers in the context of finitely generated nilpotent groups: see these references here for more details.
On the other hand, we do not dispose of complete answers in the other settings.
For instance, the existence question i) is open in general, but if we ask what discrete groups have semi-simple envelopes, then some necessary conditions are known. For example, H. Kesten proved in 1959 (see this paper here) that if is a finitely generated group, say that is generated by  , and a semi-simple Lie group envelopes , then
, and a semi-simple Lie group envelopes , then

where  is the number of elements of obtained as the products of at most
is the number of elements of obtained as the products of at most  of the
of the  ‘s and their inverses (i.e., elements of the form
‘s and their inverses (i.e., elements of the form  where
where  for each
for each  and
and  ).
).
Remark 1 Note that Kesten’s condition (of exponential growth of ) is independent of the particular set  of generators of used. Moreover, it is not satisfied by Abelian groups and it is satisfied by free groups
of generators of used. Moreover, it is not satisfied by Abelian groups and it is satisfied by free groups  (on any number
(on any number  of generators).
of generators).
Also, the uniqueness question ii) is trivially false if we insist on a “simple-minded uniqueness”: indeed, from the definition, if is an envelope of , then  is also an envelope of whenever
is also an envelope of whenever  is a compact Lie group.
is a compact Lie group.
So, the uniqueness question ii) has some chance of having an affirmative answer only if we ask for uniqueness of the envelope modulo compact factors. In particular, it is natural to ask whether two Lie groups and without compact factors (i.e., for  , one has that
, one has that  with
with  compact Lie group) can envelope the same discrete group.
compact Lie group) can envelope the same discrete group.
In this direction, H. Furstenberg proved the following result:
Theorem 3 (H. Furstenberg (1967))  ,
,  , can not envelope a discrete subgroup enveloped by .
, can not envelope a discrete subgroup enveloped by .
A direct consequence of this theorem (and Examples 1 and 2) is:
Corollary 4 The free group on two generators can not occur with index in  for .
for .
Finally, the rigidity question iii) is known to admit affirmative or negative answers depending on the context: for example, Mostow rigidity theorem shows that the answer is affirmative for the fundamental groups of complete, finite-volume, hyperbolic manifolds of dimension  , while the presence of several distinct (i.e., non-biholomorphic) Riemann surface structures on a topological compact surface of genus shows that the isomorphism between fundamental groups do not extend to automorphisms of .
, while the presence of several distinct (i.e., non-biholomorphic) Riemann surface structures on a topological compact surface of genus shows that the isomorphism between fundamental groups do not extend to automorphisms of .
In the current series of posts, we will discuss the general lines of the proof of Furstenberg’s theorem 3 as an “excuse” to study the features of the Poisson boundaries of lattices of . Indeed, the basic idea is that a discrete subgroup “determines” the behavior at infinite of its envelopes in the sense that the “accumulation points” of random walks on form a natural (Poisson) “boundary”  coinciding with the corresponding “boundaries”
coinciding with the corresponding “boundaries”  of its envelopes. In particular, we will see that a discrete group can’t be enveloped by both and ,
of its envelopes. In particular, we will see that a discrete group can’t be enveloped by both and ,  at the same time because the boundaries of and , , are distinct.
at the same time because the boundaries of and , , are distinct.
In other words, despite the fact that Theorem 3 is a statement about lattices of Lie groups, Furstenberg’s proof of it is mainly probabilistic (i.e., based on the nature of random walks).
2. Naive description of the boundary
Before giving the formal definition of the Poisson boundary, let us spend some time discussing a partial version of the definition in the particular case of the free group in finitely many generators where the naive idea of “taking accumulation points of random walks” works.
Let be the free group in  generators
generators  . By definition, an element of has the form
. By definition, an element of has the form  where
where  for each
for each  , and, furthermore, this representation is unique if we require that there is no cancellation, i.e.,
, and, furthermore, this representation is unique if we require that there is no cancellation, i.e.,  for each
for each  . In order to compactify by adding a boundary associated to accumulation points of random walks, we consider the set
. In order to compactify by adding a boundary associated to accumulation points of random walks, we consider the set

consisting of infinite words  verify the no-cancellation condition for all
verify the no-cancellation condition for all  . We see that the space
. We see that the space  equipped with the topology of pointwise convergence is compact.
equipped with the topology of pointwise convergence is compact.
The boundary  has two important features that we will encounter later when introducing the Poisson boundary.
has two important features that we will encounter later when introducing the Poisson boundary.
Firstly, the boundary of was found by looking at the accumulation points of sequences in .
Secondly, all “lattices”, i.e., finite-index subgroups, of have the same boundary . In fact, given  , we can find a sequence
, we can find a sequence  such that
such that  as follows. Fix
as follows. Fix  such that
such that  . Since has finite-index in , there exists a finite set
. Since has finite-index in , there exists a finite set  such that
such that  . In particular, there exists
. In particular, there exists  such that
such that  for infinitely many
for infinitely many  , i.e., there exists a subsequence
, i.e., there exists a subsequence  such that
such that  for all . On the other hand, from the definition of pointwise convergence, we have that
for all . On the other hand, from the definition of pointwise convergence, we have that  as
as  (because as
(because as  ), that is,
), that is,  is accumulated by elements in . Because
is accumulated by elements in . Because  was arbitrary, we deduce that is the boundary of .
was arbitrary, we deduce that is the boundary of .
In general, a straightforward generalization of the boundary via taking accumulation points of sequences does not work well for arbitrary discrete groups (in the sense that, even in the favorable situations when we get a well-defined boundary from this construction, this boundary might heavily depend on the group, and this is a property that is not desirable in our context as we want all lattices of a given Lie group to share the same boundary).
Here, the basic idea is to add further structure to the discussion. More concretely, instead of trying to understand all possible ways to go to infinity, it is better to use group invariant random walks. While a more formal definition of the Poisson boundary will appear later in this post, let us for now informally discuss this random walk approach for the construction of a boundary of a couple examples of groups.
We think of a random walk as a particle jumping from one state  to the next state
to the next state  accordingly to a set of probabilities describing how likely it is to jump from one state to another state. We say that a random walk on is group invariant if the probability of jumping from
accordingly to a set of probabilities describing how likely it is to jump from one state to another state. We say that a random walk on is group invariant if the probability of jumping from  to
to  is the same as jumping from
is the same as jumping from  to
to  for all
for all  .
.
Example 4 The random walk on  where the probabilities of jumping from
where the probabilities of jumping from  to
to  or
or  are equal to
are equal to  is group invariant. More generally, the random walk on
is group invariant. More generally, the random walk on  where the probabilities of jumping from
where the probabilities of jumping from  to
to  or
or  or
or  or
or  are equal to
are equal to  is group invariant, as well as the natural generalization of this random walk to
is group invariant, as well as the natural generalization of this random walk to  .
.
In the context of random walks  on described in the previous example, it is known that there are two possible behaviors (with probability
on described in the previous example, it is known that there are two possible behaviors (with probability  ): for
): for  or
or  , the random walk is recurrent in the sense that it will visit all states of infinitely often (with probability ), while for
, the random walk is recurrent in the sense that it will visit all states of infinitely often (with probability ), while for  , the random walk is transient in the sense that
, the random walk is transient in the sense that  as (with probability ).
as (with probability ).
As we already hinted, the boundary will arise from the fine properties of the random walks in the transient case. Actually, as we will see later, the random walks on Abelian groups (such as the random walks on that we have just introduced) have a boring behavior at infinity (in the sense that the boundary can not be larger than one point [for abstract reasons to be detailed later]). In particular, let us change our example for the non-Abelian group . In this situation, if we consider certain “nice” random walks, then we can think of them as occurring in the hyperbolic plane  (i.e., the symmetric space associated to ). In terms of the Poincaré disk model
(i.e., the symmetric space associated to ). In terms of the Poincaré disk model  , the random walk is “comparable” to the Brownian motion
, the random walk is “comparable” to the Brownian motion  on (a continuous version of random walks) and the latter are known to be obtained from time-reparametrizations of pieces of the Brownian motion
on (a continuous version of random walks) and the latter are known to be obtained from time-reparametrizations of pieces of the Brownian motion  on
on  inside the Euclidean unit disk until they hit the boundary
inside the Euclidean unit disk until they hit the boundary  , see the picture below.
, see the picture below.
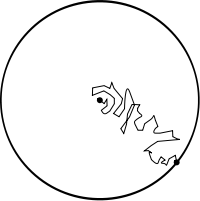
From this picture, we see that the random walk / Brownian motion in approaches exactly one point  (with probability) of the Euclidean circle (working as a circle at infinity for equipped with the hyperbolic metric, of course). In particular, we are tempted to say that
(with probability) of the Euclidean circle (working as a circle at infinity for equipped with the hyperbolic metric, of course). In particular, we are tempted to say that  is the natural boundary obtained from random walks on (the symmetric space
is the natural boundary obtained from random walks on (the symmetric space  of) .
of) .
The discussion of the previous paragraphs can be summarized as follows. We started with  and we considered certain (“nice”) group invariant random walks . Then, we attached a boundary space
and we considered certain (“nice”) group invariant random walks . Then, we attached a boundary space  to form a topological space
to form a topological space  in such a way that converges to a point in
in such a way that converges to a point in  with probability . Note that this permits to define a continuous -action on by setting
with probability . Note that this permits to define a continuous -action on by setting  if
if  . In the literature, one then says that is a –space.
. In the literature, one then says that is a –space.
Actually, the boundary space comes with a natural probability measure  corresponding to the distribution of
corresponding to the distribution of  . For our purposes, it is important to consider
. For our purposes, it is important to consider  (and not only the topological -space alone) and, for this reason, what we will call Poisson boundary will be .
(and not only the topological -space alone) and, for this reason, what we will call Poisson boundary will be .
After this informal description of the features of the Poisson boundary, let us try to formalize this notion.
3. Formal description of the Poisson boundary
From now on, let us fix be a locally compact group with a countable basis of open sets and  a probability measure on . The basic examples to keep in mind are:
a probability measure on . The basic examples to keep in mind are:
- a group of matrices (e.g., ) and a probability measure on that is absolutely continuous with respect to Haar measure;
- is a discrete group (e.g.,
 ) and is a countable sequence of non-negative weights
) and is a countable sequence of non-negative weights  , , such that
, , such that  .
.
We want to attach a -space to in such a way that is still a -space and a group invariant random walk with law in converges to a point in with probability .
As it is usual, one can get an idea of what kind of space should be by assuming that was already constructed and then by trying to extract several properties that must satisfy hoping that this set of properties “determine” .
Let us try this approach now.
3.1. Definition of a boundary of 
We start by describing what is the class of random walks that we want to look at in order to extract limits. Consider the product probability space

We represent the points of  as
as  and we observe that, by definition, the coordinate functions
and we observe that, by definition, the coordinate functions  are independent -valued random variable with distribution . We refer to
are independent -valued random variable with distribution . We refer to  as a stationary sequence of independent random variables with distribution .
as a stationary sequence of independent random variables with distribution .
We now form the product random variables  . The sequence
. The sequence  is a Markov process as the probability of a sequence of steps
is a Markov process as the probability of a sequence of steps  is the product of the probabilities of the individual transitions
is the product of the probabilities of the individual transitions  . Moreover, the transitions
. Moreover, the transitions  in the sequence are given by (right) group multiplication:
in the sequence are given by (right) group multiplication:  . For this reason, we call the sequence of product random variables a random walk in with law . By the way, note that this setting is entirely determined from the data of and .
. For this reason, we call the sequence of product random variables a random walk in with law . By the way, note that this setting is entirely determined from the data of and .
The scenario provided by is almost the one that we want to consider. Indeed, we said “almost” only because the group invariance is missing in the picture, that is, we want to consider all random walks  with in order to get a setting that is invariant under (left) group multiplication.
with in order to get a setting that is invariant under (left) group multiplication.
In summary, given and , our group invariant random walk consists of the random variables with and as above.
Next, let us suppose that we have a -space such that is a -space and the group invariant random walk converges to a point in with probability . For later use, let us observe that if the random variables  converge to a -valued random variable
converge to a -valued random variable  , then converges to
, then converges to  . In particular, for each , the sequence
. In particular, for each , the sequence  converges to a -valued random variable
converges to a -valued random variable  with the following properties:
with the following properties:
- (i)
 (by the definition of and the fact that is a -space);
(by the definition of and the fact that is a -space);
- (ii) is a function of
 (by definition);
(by definition);
- (iii) all ‘s have the same distribution (by the group invariance of );
- (iv)
 is independent of
is independent of  (by item (ii) and the independence of
(by item (ii) and the independence of  ‘s);
‘s);
In the literature, a sequence of random variables  on a -space satisfying items (i), (ii), (iii) and (iv) above is called a –process.
on a -space satisfying items (i), (ii), (iii) and (iv) above is called a –process.
In this language, we just saw that any candidate for a (Poisson) boundary of must be a -space equipped with a -process.
Let us now investigate more closely the properties of the -process associated to a “(Poisson) boundary candidate” .
Denote by the distribution of an arbitrary  (by item (iii) they have all the same distribution). In particular, the relation
(by item (iii) they have all the same distribution). In particular, the relation  (from item (i)) implies that the random variable
(from item (i)) implies that the random variable  has distribution .
has distribution .
On the other hand, given a -space  and two random variables
and two random variables  and
and  with distributions and , it is not hard to check that the distribution of the -valued random variable
with distributions and , it is not hard to check that the distribution of the -valued random variable  is the convolution
is the convolution  measure defined by:
measure defined by:

Hence, since has distribution , we deduce from the equality that

or, in probabilistic nomenclature, is a –stationary measure.
In principle, it seems that the -process is more important (in the study of Poisson boundaries) than the stationary measure . However, the following proposition shows that one can recover the topological structure of from the knowledge of thanks to the martingale convergence theorem.
Proposition 5 If is a -process with distribution , then

with probability .
Here,  denotes the push-forward of by and the convergence of the measures is in the weak-
denotes the push-forward of by and the convergence of the measures is in the weak- topology.
topology.
Proof: Let  be a test (bounded, continuous) function on the -space . By definition of weak- convergence, our task consists into showing that
be a test (bounded, continuous) function on the -space . By definition of weak- convergence, our task consists into showing that

as  with probability .
with probability .
We claim that this is a consequence of the martingale convergence theorem that the integrable random variable  satisfies
satisfies

as with probability where  denotes the conditional expectation.
denotes the conditional expectation.
Indeed, let us recall that  (cf. item (i) above) where
(cf. item (i) above) where  and
and  are independent (cf. item (iv) above), and has distribution (cf. item (iii) above). By plugging this into the definition of conditional expectation, we obtain the equality
are independent (cf. item (iv) above), and has distribution (cf. item (iii) above). By plugging this into the definition of conditional expectation, we obtain the equality

so that the desired convergence follows from the martingale convergence theorem. 
In other words, this proposition allows to recover the limit relation  , i.e., the topology of from the -stationary measure by identifying the points of with Dirac masses
, i.e., the topology of from the -stationary measure by identifying the points of with Dirac masses  and by analyzing the convergence of the sequence of push-forwards
and by analyzing the convergence of the sequence of push-forwards  to Dirac masses . This observation motivates the following definition. Given a -space equipped with a probability measure , the measure topology of with respect to is the weakest topology such that the natural inclusions
to Dirac masses . This observation motivates the following definition. Given a -space equipped with a probability measure , the measure topology of with respect to is the weakest topology such that the natural inclusions  and
and  are homeomorphisms into their images, and the map
are homeomorphisms into their images, and the map  from to the space
from to the space  of probability measures on given by
of probability measures on given by  for and
for and  is continuous.
is continuous.
At this point, our discussion so far can be summarized as follows. The investigation of the properties of a potential candidate to (Poisson) boundary led us to the notion of -process  , and, in some sense, -processes are the right object to look at because Proposition 5 says that a -process on allows to think of as boundary after endowing with the measure topology with respect to the distribution of the -process.
, and, in some sense, -processes are the right object to look at because Proposition 5 says that a -process on allows to think of as boundary after endowing with the measure topology with respect to the distribution of the -process.
For this reason, we introduce the following definition:
Definition 6 A -space equipped with a -stationary measure is a boundary of if is the distribution of a -process on .
Given this scenario, it is natural to ask whether a given -space admits some -process. The next proposition says that we already know the answer to this question.
Proposition 7 Let be a -stationary measure on a -space (i.e.,  ). Then, there exists a -process on with distribution if and only if the sequence
). Then, there exists a -process on with distribution if and only if the sequence  converges to Dirac masses on .
converges to Dirac masses on .
Proof: The implication  was already shown in Proposition 5. For the converse implication, let us set
was already shown in Proposition 5. For the converse implication, let us set  . The sequence of random variables satisfies items (i) (by continuity of the push-forward operation under continuous transformations), (ii) (by definition) and (iv) (by item (ii) and independence of ‘s). Also, item (iii) follows from the fact that the sequences
. The sequence of random variables satisfies items (i) (by continuity of the push-forward operation under continuous transformations), (ii) (by definition) and (iv) (by item (ii) and independence of ‘s). Also, item (iii) follows from the fact that the sequences  and
and  have the same probabilistic behavior.
have the same probabilistic behavior.
In particular, it remains only to check that the distribution of is . For this sake, we take a test function and we notice that

Here,  and, in the last equality, we used the fact that the distribution of
and, in the last equality, we used the fact that the distribution of  is if
is if  has distribution and
has distribution and  has distribution . Now, since is -stationary, we deduce that
has distribution . Now, since is -stationary, we deduce that

for all . Therefore, we showed that  , i.e., has distribution .
, i.e., has distribution .
3.2. Definition of the Poisson boundary of
For our purposes, we want the Poisson boundary of to be a boundary that is as “large” as possible: intuitively, the large boundary sees the fine properties of , and, in particular, we can expect to distinguish between several groups (such as the lattices of and , ) by looking at their largest boundaries.
3.2.1. Equivariant images
In order to “compare” boundaries, we consider equivariant maps between them: given two boundaries and  of , we say that is an equivariant image of if there is an equivariant map
of , we say that is an equivariant image of if there is an equivariant map  (i.e., a map such that
(i.e., a map such that  for all
for all  and ) such that
and ) such that  .
.
Remark 2 This definition makes sense as the notion of equivariant image preserves boundaries: in fact, if is a -process on , then  is a -process on
is a -process on  .
.
In the light of this definition, it is tempting to say that the Poisson boundary of is the “largest” boundary in the sense that all other boundaries can be obtained as equivariant images of .
As it turns out, this is an almost complete description of the Poisson boundary. Indeed, before giving the complete definition, we will need to discuss –harmonic functions on because, as we will see, they are important objects in the construction of Poisson boundaries.
Here, the basic idea is that we can “recover” a space from the knowledge of the functions on it. In the particular case that is a -space such that is a -space and  converges with probability (i.e., is a candidate to be a boundary), a continuous function
converges with probability (i.e., is a candidate to be a boundary), a continuous function  extending to a continuous function on has the property that
extending to a continuous function on has the property that  converges with probability . Thus, we can “recover” information on from the class
converges with probability . Thus, we can “recover” information on from the class  of functions on with the property that converges with probability (because these functions “induce” functions on ). Of course, the main point of the class is that it is canonically attached to and hence it is natural to use to produce reference (Poisson) boundaries. In this setting, the -harmonic functions that we mentioned above are an interesting subclass of the class .
of functions on with the property that converges with probability (because these functions “induce” functions on ). Of course, the main point of the class is that it is canonically attached to and hence it is natural to use to produce reference (Poisson) boundaries. In this setting, the -harmonic functions that we mentioned above are an interesting subclass of the class .
3.2.2. -harmonic functions on
A -harmonic function is a function satisfying the following analog of the mean value property for classical harmonic functions:
Definition 8 A bounded measurable function  on is -harmonic if
on is -harmonic if

for all . We denote by  the class of -harmonic functions.
the class of -harmonic functions.
Remark 3 Since the stationary sequence of independent random variables  has distribution , we have that any
has distribution , we have that any  satisfies
satisfies

for each .
The following proposition says that the class of -harmonic functions is a subclass of the class of bounded measurable functions such that converges with probability .
Proposition 9 For each , let  and
and  where (i.e., is -harmonic). Then,
where (i.e., is -harmonic). Then,  converges with probability and
converges with probability and  satisfies
satisfies

Proof: Similarly to Proposition 5, this proposition is a consequence of the martingale convergence theorem. More concretely, the scheme of the proof is the following. We will show below that converges in  (where
(where  ) to
) to  , and
, and  for . In particular, since the martingale convergence theorem ensures that
for . In particular, since the martingale convergence theorem ensures that  converges to with probability , the first assertion of the proposition will then follow.
converges to with probability , the first assertion of the proposition will then follow.
Let us now show that  in
in  . Set
. Set  and
and  . We claim that the
. We claim that the  ‘s are mutually -orthogonal. Indeed, by Remark 3,
‘s are mutually -orthogonal. Indeed, by Remark 3,

so that  for each .
for each .
Now, let us use this information to compute the -inner product  between and
between and  for
for  . By letting the variables
. By letting the variables  fixed while allowing
fixed while allowing  to vary, we see that
to vary, we see that  is fixed and only varies. In particular, by performing first the integration with respect to in the integral defining , we deduce that is a multiple of (by the previous paragraph), i.e., the random variables are mutually -orthogonal.
is fixed and only varies. In particular, by performing first the integration with respect to in the integral defining , we deduce that is a multiple of (by the previous paragraph), i.e., the random variables are mutually -orthogonal.
From this -orthogonality, we get

In particular,  has a limit in that we denote by .
has a limit in that we denote by .
As we already mentioned, the first assertion of the proposition will follow (from the martingale convergence theorem) once we show that for . In this direction, we observe that  for all
for all  (cf. Remark 3). By putting this together with the -orthogonality of ‘s (and the fact that by definition), we obtain that
(cf. Remark 3). By putting this together with the -orthogonality of ‘s (and the fact that by definition), we obtain that

for all  . Therefore, by the -convergence of to , we conclude that
. Therefore, by the -convergence of to , we conclude that

so that the proof of the proposition is complete.
For later use, we will note that a -harmonic function is determined by its boundary values (similarly to Poisson’s formula for classical harmonic functions):
Proposition 10 Let be a -stationary measure on a -space . Then, given  a bounded measurable function on , the function
a bounded measurable function on , the function

is -harmonic.
Proof: By definition, given ,

By performing the change of variables  and using the definition of the convolution measure , we see that
and using the definition of the convolution measure , we see that

Since is -stationary, i.e., , we deduce that

that is, is -harmonic.
Corollary 11 Let be a compact -space equipped with a -stationary probability measure . Then, the sequence of probability measures converges in with probability .
Proof: We want to show that the sequence converges in with probability . For this sake, it is sufficient to check that, with probability , the integrals

converge for all continuous functions on .
Given a continuous function on , by Proposition 10 we have that

where the function  is -harmonic.
is -harmonic.
It follows from Proposition 9 that  converges with probability and this almost complete the proof of the corollary.
converges with probability and this almost complete the proof of the corollary.
Indeed, we showed that, for each continuous function on , there exists a set  with full probability such that the integrals
with full probability such that the integrals  converge whenever
converge whenever  . However, the quantifiers in the last phrase do not correspond to the statement in the corollary as the latter asks for a set
. However, the quantifiers in the last phrase do not correspond to the statement in the corollary as the latter asks for a set  of full probability working for all continuous functions on at once! Fortunately, this little technical problem is not hard to overcome: since is a compact (Hausdorff) space, the space of continuous functions on has a countable dense subset
of full probability working for all continuous functions on at once! Fortunately, this little technical problem is not hard to overcome: since is a compact (Hausdorff) space, the space of continuous functions on has a countable dense subset  ; in particular, by setting
; in particular, by setting

we get a full probability set such that, for all continuous , the integrals
converge whenever  .
.
At this stage, we are ready to give the definition of the Poisson boundary of .
3.2.3. Definition of the Poisson boundary
We say that a boundary of is the Poisson boundary if:
Completing our discussion so far, we will show in next section that the Poisson boundary always exists.
4. Construction of Poisson boundary
The main result of this section is:
Theorem 12 (Furstenberg (1963)) Let be a locally compact group with a countable basis of open sets and let be a probability measure on . Then, admits a Poisson boundary .
Proof: The basic strategy to construct using the class of -harmonic functions.
However, we will not work exclusively with and, in fact, we will use also the slightly larger class  of bounded measurable functions on such that
of bounded measurable functions on such that  exists with probability . Indeed, from the technical point of view, the main advantage of over is the fact that is a Banach algebra (with respect to the
exists with probability . Indeed, from the technical point of view, the main advantage of over is the fact that is a Banach algebra (with respect to the  -norm) while is not.
-norm) while is not.
Nevertheless, is not “very different” from . More precisely, let  be the ideal of consisting of the functions
be the ideal of consisting of the functions  such that converges to zero with probability .
such that converges to zero with probability .
Lemma 13  . In particular,
. In particular,  .
.
For the proof of this lemma (and also for later use), we will need the auxiliary class  of limit functions
of limit functions  corresponding to the “boundary values” of functions . Note that is also a Banach algebra and
corresponding to the “boundary values” of functions . Note that is also a Banach algebra and  .
.
Proof: Given , we can produce a -harmonic function by letting  and
and  . Indeed, the -harmonicity of can be checked as follows. Let
. Indeed, the -harmonicity of can be checked as follows. Let  be a random variable independent of the random variables ‘s on
be a random variable independent of the random variables ‘s on  with distribution . Consider the expression
with distribution . Consider the expression  . Since the sequences
. Since the sequences  and
and  are probabilistically equivalent, we have that
are probabilistically equivalent, we have that

Let us now show that  (so that
(so that  with and ). By repeating the “shift of variables” argument of the previous paragraph, we see that
with and ). By repeating the “shift of variables” argument of the previous paragraph, we see that

On the other hand, the martingale convergence theorem says that  (with probability ), so that we deduce that
(with probability ), so that we deduce that

(with probability ). In particular, this means (by definition) that .
Completing the proof of the lemma, it remains to verify that  . This fact follows immediately from Proposition 9 saying that a -harmonic function can be recovered from its boundary values.
. This fact follows immediately from Proposition 9 saying that a -harmonic function can be recovered from its boundary values.
From this lemma, we have that  . Now, note that
. Now, note that  is a commutative
is a commutative  -algebra, so that it has a representation as the space
-algebra, so that it has a representation as the space  of continuous function on a compact (Hausdorff) space
of continuous function on a compact (Hausdorff) space  (called the spectrum of ) by Gelfand’s representation theorem.
(called the spectrum of ) by Gelfand’s representation theorem.
From this, we deduce two consequences: firstly, we have a correspondence between -harmonic functions  on and continuous functions
on and continuous functions  on ; secondly, the “evaluation at identity” functional
on ; secondly, the “evaluation at identity” functional  associating to each -harmonic function is value at
associating to each -harmonic function is value at  , i.e.,
, i.e.,  is a linear functional that is non-negative (that is, it takes non-negative values on non-negative elements of ) and it takes the constant function to the real value , so that, by Riesz representation theorem, there exists an unique probability measure
is a linear functional that is non-negative (that is, it takes non-negative values on non-negative elements of ) and it takes the constant function to the real value , so that, by Riesz representation theorem, there exists an unique probability measure  on such that
on such that
Note that is a -space as the natural action of on via  for each sends into itself. Also, if a -harmonic function corresponds to , then
for each sends into itself. Also, if a -harmonic function corresponds to , then  corresponds to
corresponds to  . In particular, the formula above for gives the following Poisson formula:
. In particular, the formula above for gives the following Poisson formula:

A pleasant point about the construction of  is that it is canonical (i.e., it leads to an unique object) and, in particular, it is tempting to use
is that it is canonical (i.e., it leads to an unique object) and, in particular, it is tempting to use  as the Poisson boundary.
as the Poisson boundary.
However, this does not work because is too “large”, i.e., it might not have a countable basis of open sets. So, the notions of convergence of sequences of points or measures is not “natural” for a technical reason that we already encountered in the end of the proof of Corollary 11. Namely, when trying to prove that a sequence of measures  (depending on
(depending on  ) on converges with probability , we will show that for each continuous function
) on converges with probability , we will show that for each continuous function  there exists a full measure set such that the integrals
there exists a full measure set such that the integrals  converges for any element of , but if has no countable basis, we can’t select a countable dense set
converges for any element of , but if has no countable basis, we can’t select a countable dense set  of continuous functions and, hence, we can’t conclude that the integrals converge with probability via the usual argument of taking
of continuous functions and, hence, we can’t conclude that the integrals converge with probability via the usual argument of taking  .
.
To overcome this difficulty, we observe that is separable, so that the spaces  are separable for
are separable for  . In particular, one can find a subalgebra
. In particular, one can find a subalgebra  of
of  possessing a countable dense set which is also dense in for all . Furthermore, since has a countable dense subset
possessing a countable dense set which is also dense in for all . Furthermore, since has a countable dense subset  , we can choose the subalgebra to be -invariant (by “forcing” invariance with respect to every ). Using one can define a quotient space of such that is isomorphic to the space of continuous functions
, we can choose the subalgebra to be -invariant (by “forcing” invariance with respect to every ). Using one can define a quotient space of such that is isomorphic to the space of continuous functions  . Note that comes equipped with a probability measure (obtained by push-forward of with respect to the projection
. Note that comes equipped with a probability measure (obtained by push-forward of with respect to the projection  ). Moreover, since
). Moreover, since  is the completion of with respect to the
is the completion of with respect to the  -norm and is dense in , we see that the spaces and are the same. In other words, the passage from to makes that the class of continuous functions gets smaller, but the class of bounded measurable functions stays the same.
-norm and is dense in , we see that the spaces and are the same. In other words, the passage from to makes that the class of continuous functions gets smaller, but the class of bounded measurable functions stays the same.
We claim that, by replacing by , the technical difficulty mentioned above disappears and we get the Poisson boundary of .
Let us start the proof of this claim by observing that the Poisson formula, i.e., item (b) in the definition of Poisson boundary, follows immediately from the definition of and the corresponding Poisson formula (1) for . In particular, the Poisson formula for becomes

where  is a bounded measurable function (corresponding to
is a bounded measurable function (corresponding to  ).
).
Remark 4 In fact, in item (b) of the definition of the Poisson boundary, one also requires the uniqueness of modulo nullfunctions. In fact, this is not hard to show, but we will omit the details.
Next, let us check that is a -stationary measure. Note that, by definition, given a continuous function  , the function
, the function
is -harmonic, i.e.,  (as is the measure representing the linear function ). In particular,
(as is the measure representing the linear function ). In particular,

that is, and define the same linear functional from to . Therefore, , i.e., is -stationary.
Now, let us show that is a boundary of . By Proposition 7, our task consists in proving that converges to a Dirac mass with probability . In this direction, note that, by Corollary 11 (applied to and then “transferred” to ), we know that converges to some probability measure  (with probability ). So, it remains to show that is a Dirac mass with probability . For this sake, let us fix
(with probability ). So, it remains to show that is a Dirac mass with probability . For this sake, let us fix  a test function and let us denote by
a test function and let us denote by  the corresponding -harmonic function. From the Poisson formula (2), we get that
the corresponding -harmonic function. From the Poisson formula (2), we get that

On the other hand, the isomorphism between and the functions on is an algebra isomorphism. In particular,

that is, we have equality in Cauchy-Schwarz inequality. It follows that  is -almost everywhere constant. Since this occurs for all continuous function , we deduce that is a Dirac mass.
is -almost everywhere constant. Since this occurs for all continuous function , we deduce that is a Dirac mass.
Finally, we complete the sketch of proof of the theorem by showing that is maximal in the sense of item (a), i.e., any boundary  is an equivariant image of . Keeping this goal in mind, we will construct a natural -algebra morphism from
is an equivariant image of . Keeping this goal in mind, we will construct a natural -algebra morphism from  into
into  , i.e., a morphism which is compatible with the natural -actions on both algebras and respecting the linear functionals induced by
, i.e., a morphism which is compatible with the natural -actions on both algebras and respecting the linear functionals induced by  and . Let
and . Let  and consider the -harmonic function
and consider the -harmonic function  on . Denote by
on . Denote by  the limit function associated to and let
the limit function associated to and let  the -process on . By Proposition 5,
the -process on . By Proposition 5,  , and, thus,
, and, thus,

This formula makes it clear that the map  is an algebra morphism from into . Furthermore, this formula also shows that the natural actions of on these algebras are preserved, and, moreover, the linear functional induced by both and is given by
is an algebra morphism from into . Furthermore, this formula also shows that the natural actions of on these algebras are preserved, and, moreover, the linear functional induced by both and is given by  .
.
This completes the proof of Furstenberg’s theorem on the existence of Poisson boundaries.
Remark 5 The arguments above show that the measure-theoretical object  is uniquely determined, despite the fact that the topological space is not unique. Nevertheless, we will not dispense the topological structure in the definition of Poisson boundary because we want to think about it as a space attached to the group.
is uniquely determined, despite the fact that the topological space is not unique. Nevertheless, we will not dispense the topological structure in the definition of Poisson boundary because we want to think about it as a space attached to the group.
Remark 6 A “cousin” of the Poisson boundary is the so-called Martin boundary. Very roughly speaking, the Martin boundary is related to positive not necessarily bounded harmonic function while the Poisson boundary is related to bounded harmonic functions. In general, the Martin boundary is a realization of the Poisson boundary, but not vice-versa. For our current purpose (namely, the proof of Theorem 3), the Poisson boundary has the advantage that it does not change too much when we change the measure in a reasonable way, while the same is not true for the Martin boundary.
The summary of today’s post is the following. We saw that Furstenberg’s idea for the proof of his Theorem 3 (that a lattice of can’t be realized as a lattice of , ) was to show that the boundary behavior of a discrete group is determined by the boundary behavior of its envelope. Of course, the formalization of this idea requires the construction of an adequate boundary and this is precisely what we did in this section.
Next time, we will discuss some examples of Poisson boundary. After that, we will relate the Poisson boundary of a lattice of to the Poisson boundary of and, then, we will complete the proof of Theorem 3.


Leave a comment